Additionally, 5G NR supports π/2-BPSK in uplink (to be combined with OFDM with CP or DFT-s OFDM with CP)[1][2]. Utilization of π/2-BPSK in the uplink is aimed at providing further reduction of peak-to-average power ratio (PAPR) and boosting RF amplifier power efficiency at lower data-rates.
π/2 BPSK
π/2 BPSK uses two sets of BPSK constellations that are shifted by 90°. The constellation sets are selected depending on the position of the bits in the input sequence. Figure (1) depicts the two constellation sets for π/2 BPSK that are defined as per equation (1)
b[i] = input bits; i = position or index of input bits; d[i] = mapped bits (constellation points)
Figure 1: Two rotated constellation sets for use in π/2 BPSK
Equation (2) is for conventional BPSK – given for comparison. Figure (2) and Figure (3) depicts the ideal constellations and waveforms for BPSK and π/2 BPSK, when a long sequence of random input bits are input to the BPSK and π/2 BPSK modulators respectively. From the waveform, you may note that π/2 BPSK has more phase transitions than BPSK. Therefore π/2 BPSK also helps in better synchronization, especially for cases with long runs of 1s and 0s in the input sequence.
In wireless environments, transmitted signal may be subjected to multiple scatterings before arriving at the receiver. This gives rise to random fluctuations in the received signal and this phenomenon is called fading. The scattered version of the signal is designated as non line of sight (NLOS) component. If the number of NLOS components are sufficiently large, the fading process is approximated as the sum of large number of complex Gaussian process whose probability-density-function follows Rayleigh distribution.
Rayleigh distribution is well suited for the absence of a dominant line of sight (LOS) path between the transmitter and the receiver. If a line of sight path do exist, the envelope distribution is no longer Rayleigh, but Rician (or Ricean). If there exists a dominant LOS component, the fading process can be represented as the sum of complex exponential and a narrowband complex Gaussian process g(t). If the LOS component arrive at the receiver at an angle of arrival(AoA)θ, phase ɸ and with the maximum Doppler frequency fD, the fading process in baseband can be represented as (refer [1])
where, K represents the Rician K factor given as the ratio of power of the LOS component A2 to the power of the scattered components (S2) marked in the equation above.
\[K=\frac{A^2}{S^2}\]
The received signal power Ω is the sum of power in LOS component and the power in scattered components, given as Ω=A2+S2. The above mentioned fading process is called Rician fading process. The best and worst-case Rician fading channels are associated with K=∞ and K=0 respectively. A Ricean fading channel with K=∞ is a Gaussian channel with a strong LOS path. Ricean channel with K=0 represents a Rayleigh channel with no LOS path.
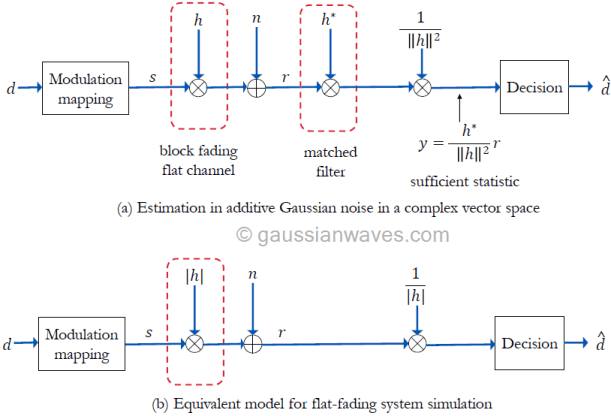
Figure 1: Simulation model for modulation and detection over flat fading channel
Simulation and performance results
In chapter 5 of the book Wireless communication systems in Matlab, the code implementation for complex baseband models for various digital modulators and demodulator are given. The computation and generation of AWGN noise is also given in the book. Using these models, we can create a unified simulation for code for simulating the performance of various modulation techniques over Rician flat-fading channel the simulation model shown in Figure 1(b).
An unified approach is employed to simulate the performance of any of the given modulation technique – MPSK, MQAM or MPAM. The simulation code (given in the book) will automatically choose the selected modulation type, performs Monte Carlo simulation, computes symbol error rates and plots them against the theoretical symbol error rate curves. The simulated performance results obtained for various modulations are shown in the Figure 2.
Figure 2: Performance of various modulations over Ricean flat fading channel
Rate this article: Note: There is a rating embedded within this post, please visit this post to rate it.
Key focus: Simulate bit error rate performance of Binary Phase Shift Keying (BPSK) modulation over AWGN channel using complex baseband equivalent model in Python & Matlab.
Why complex baseband equivalent model
The passband model and equivalent baseband model are fundamental models for simulating a communication system. In the passband model, also called as waveform simulation model, the transmitted signal, channel noise and the received signal are all represented by samples of waveforms. Since every detail of the RF carrier gets simulated, it consumes more memory and time.
In the case of discrete-time equivalent baseband model, only the value of a symbol at the symbol-sampling time instant is considered. Therefore, it consumes less memory and yields results in a very short span of time when compared to the passband models. Such models operate near zero frequency, suppressing the RF carrier and hence the number of samples required for simulation is greatly reduced. They are more suitable for performance analysis simulations. If the behavior of the system is well understood, the model can be simplified further.
In binary phase shift keying, all the information gets encoded in the phase of the carrier signal. The BPSK modulator accepts a series of information symbols drawn from the set m∈{0,1}, modulates them and transmits the modulated symbols over a channel.
The general expression for generating a M-PSK signal set is given by
Here, M denotes the modulation order and it defines the number of constellation points in the reference constellation. The value of M depends on the parameter k – the number of bits we wish to squeeze in a single M-PSK symbol. For example if we wish to squeeze in 3 bits (k=3) in one transmit symbol, then M = 2k = 23 = 8 and this results in 8-PSK configuration. M=2 gives BPSK (Binary Phase Shift Keying) configuration. The parameter A is the amplitude scaling factor, fc is the carrier frequency and g(t) is the pulse shape that satisfies orthonormal properties of basis functions.
Using trigonometric identity, equation (1) can be separated into cosine and sine basis functions as follows
Therefore, the signaling set {si,sq} or the constellation points for M-PSK modulation is given by,
For BPSK (M=2), the constellation points on the I-Q plane (Figure 1) are given by
In this simulation methodology, there is no need to simulate each and every sample of the BPSK waveform as per equation (1). Only the value of a symbol at the symbol-sampling time instant is considered. The steps for simulation of performance of BPSK over AWGN channel is as follows (Figure 2)
Generate a sequence of random bits of ones and zeros of certain length (Nsym typically set in the order of 10000)
Using the constellation points, map the bits to modulated symbols (For example, bit ‘0’ is mapped to amplitude value A, and bit ‘1’ is mapped to amplitude value -A)
Compute the total power in the sequence of modulated symbols and add noise for the given EbN0 (SNR) value (read this article on how to do this). The noise added symbols are the received symbols at the receiver.
Use thresholding technique, to detect the bits in the receiver. Based on the constellation diagram above, the detector at the receiver has to decide whether the receiver bit is above or below the threshold 0.
Compare the detected bits against the transmitted bits and compute the bit error rate (BER).
Figure 2: Simulation methodology for performance of BPSK modulation over AWGN channel
Let’s simulate the performance of BPSK over AWGN channel in Python & Matlab.
Simulation using Python
Following standalone code simulates the bit error rate performance of BPSK modulation over AWGN using Python version 3. The results are plotted in Figure 3.
Following code simulates the bit error rate performance of BPSK modulation over AWGN using basic installation of Matlab. You will need the add_awgn_noise function that was discussed in this article. The results will be same as Figure 3.
The phase transition properties of the different variants of QPSK schemes and MSK, are easily investigated using constellation diagram. Let’s demonstrate how to plot the signal space constellations, for the various modulations used in the transmitter.
Typically, in practical applications, the baseband modulated waveforms are passed through a pulse shaping filter for combating the phenomenon of intersymbol interference (ISI). The goal is to plot the constellation plots of various pulse-shaped baseband waveforms of the QPSK, O-QPSK and π/4-DQPSK schemes. A variety of pulse shaping filters are available and raised cosine filter is specifically chosen for this demo. The raised cosine (RC) pulse comes with an adjustable transition band roll-off parameter α, using which the decay of the transition band can be controlled.
The RC pulse shaping function is expressed in frequency domain as
Equivalently, in time domain, the impulse response corresponds to
A simple evaluation of the equation (2) produces singularities (undefined points) at p(t = 0) and p(t = ±Tsym/(2α)). The value of the raised cosine pulse at these singularities can be obtained by applying L’Hospital’s rule [1] and the values are
The function is then tested. It generates a raised cosine pulse for the given symbol duration Tsym = 1s and plots the time-domain view and the frequency response as shown in Figure 1. From the plot, it can be observed that the RC pulse falls off at the rate of 1/|t|3 as t→∞, which is a significant improvement when compared to the decay rate of a sinc pulse which is 1/|t|. It satisfies Nyquist criterion for zero ISI – the pulse hits zero crossings at desired sampling instants. The transition bands in the frequency domain can be made gradual (by controlling α) when compared to that of a sinc pulse.
Figure 1: Raised-cosine pulse and its manifestation in frequency domain
Plotting constellation diagram
Now that we have constructed a function for raised cosine pulse shaping filter, the next step is to generate modulated waveforms (using QPSK, O-QPSK and π/4-DQPSK schemes), pass them through a raised cosine filter having a roll-off factor, say α = 0.3 and finally plot the constellation. The constellation for MSK modulated waveform is also plotted.
The resulting simulated plot is shown in the Figure 2. From the resulting constellation diagram, following conclusions can be reached.
Conventional QPSK has 180° phase transitions and hence it requires linear amplifiers with high Q factor
The phase transitions of Offset-QPSK are limited to 90° (the 180° phase transitions are eliminated)
The signaling points for π/4-DQPSK is toggled between two sets of QPSK constellations that are shifted by 45° with respect to each other. Both the 90° and 180° phase transitions are absent in this constellation. Therefore, this scheme produces the lower envelope variations than the rest of the two QPSK schemes.
MSK is a continuous phase modulation, therefore no abrupt phase transition occurs when a symbol changes. This is indicated by the smooth circle in the constellation plot. Hence, a band-limited MSK signal will not suffer any envelope variation, whereas, the rest of the QPSK schemes suffer varied levels of envelope variations, when they are band-limited.
In coherent detection, the receiver derives its demodulation frequency and phase references using a carrier synchronization loop. Such synchronization circuits may introduce phase ambiguity in the detected phase, which could lead to erroneous decisions in the demodulated bits. For example, Costas loop exhibits phase ambiguity of integral multiples of radians at the lock-in points. As a consequence, the carrier recovery may lock in radians out-of-phase thereby leading to a situation where all the detected bits are completely inverted when compared to the bits during perfect carrier synchronization. Phase ambiguity can be efficiently combated by applying differential encoding at the BPSK modulator input (Figure 1) and by performing differential decoding at the output of the coherent demodulator at the receiver side (Figure 2).
In ordinary BPSK transmission, the information is encoded as absolute phases: for binary 1 and for binary 0. With differential encoding, the information is encoded as the phase difference between two successive samples. Assuming is the message bit intended for transmission, the differential encoded output is given as
The differentially encoded bits are then BPSK modulated and transmitted. On the receiver side, the BPSK sequence is coherently detected and then decoded using a differential decoder. The differential decoding is mathematically represented as
This method can deal with the phase ambiguity introduced by synchronization circuits. However, it suffers from performance penalty due to the fact that the differential decoding produces wrong bits when: a) the preceding bit is in error and the present bit is not in error , or b) when the preceding bit is not in error and the present bit is in error. After differential decoding, the average bit error rate of coherently detected BPSK over AWGN channel is given by
Figure 2: Coherent detection of differentially encoded BPSK signal
Following is the Matlab implementation of the waveform simulation model for the method discussed above. Both the differential encoding and differential decoding blocks, illustrated in Figures 1 and 2, are linear time-invariant filters. The differential encoder is realized using IIR type digital filter and the differential decoder is realized as FIR filter.
File 1: dbpsk_coherent_detection.m: Coherent detection of D-BPSK over AWGN channel
Figure 3 shows the simulated BER points together with the theoretical BER curves for differentially encoded BPSK and the conventional coherently detected BPSK system over AWGN channel.
The goal of timing recovery is to estimate and correct the sampling instants and phase at the receiver, such that it allows the receiver to decode the transmitted symbols reliably.
What is Symbol timing Recovery :
When transmitting data across a communication system, three things are important: frequency of transmission, phase information and the symbol rate.
In coherent detection/demodulation, both the transmitter and receiver posses the knowledge of exact symbol sampling timing and symbol phase (and/or symbol frequency). While everything is set at the transmitter, the receiver is at the mercy of recovery algorithms to regenerate these information from the incoming signal itself. If the transmission is a passband transmission, the carrier recovery algorithm also recovers the carrier frequency. For phase sensitive systems like BPSK, QPSK etc.., the carrier recovery algorithm recovers the symbol phase so that it is synchronous with the transmitted symbol.
The first part in such a receiver architecture of a MPSK transmitting system is multiplying the incoming signal with sine and cosine components of the carrier wave.
The sine and cosine components are generated using a carrier recovery block (Phase Lock Loop (PLL) or setting a local oscillator to track the variations).
Once the in-phase and quadrature signals are separated out properly, the next task is to match each symbol with the transmitted pulse shape such that the overall SNR of the system improves.
Implementing this in digital domain, the architecture described so far would look like this (Note: the subscript of the incoming signal has changed from analog domain to digital domain – i.e. to )
In the digital architecture above, the matched filter is implemented as a simple finite impulse response (FIR) filter whose impulse response is matched to that of the transmitter pulse shape. It helps the receiver in timing recovery and also it improves the overall SNR of the system by suppressing some amount of noise. The incoming signal up to the point before the matched filter, may have fluctuations in the amplitude. The matched filter also behaves like an averaging filter that smooths out the variations in the signal.
Note that in this digital version, the incoming signal is already a sampled signal. It has already passed through an analog to digital converter that sampled the signal at some sampling rate. From the symbol perspective, the symbols have to be sampled at optimum sampling instant to extract its content properly.
This requires a re-sampler, which resamples the averaged signal at the optimum sampling instant. If the original sampling instant is before or after the optimum sampling point, the timing recovery signal will help to re-sample (re-adjust sampling times) accordingly.
An alternate data pattern (symbols) – [+1,-1,+1,+1,\cdots,] is transmitted across the channel. Assume that each symbol occupies Tsym=8 sample time.
clear all; clc;
n=10; %Number of data symbols
Tsym=8; %Symbol time interms of sample time or oversampling rate equivalently
%data=2*(rand(n,1)<0.5)-1;
data=[1 -1 1 -1 1 -1 1 -1 1 -1]'; %BPSK data
bpsk=reshape(repmat(data,1,Tsym)',n*Tsym,1); %BPSK signal
figure('Color',[1 1 1]);
subplot(3,1,1);
plot(bpsk);
title('Ideal BPSK symbols');
xlabel('Sample index [n]');
ylabel('Amplitude')
set(gca,'XTick',0:8:80);
axis([1 80 -2 2]); grid on;
Lets add white gaussian noise (awgn). A random noise of standard deviation 0.25 is generated and added with the generated BPSK symbols.
noise=0.25*randn(size(bpsk)); %Adding some amount of noise
received=bpsk+noise; %Received signal with noise
subplot(3,1,2);
plot(received);
title('Transmitted BPSK symbols (with noise)');
xlabel('Sample index [n]');
ylabel('Amplitude')
set(gca,'XTick',0:8:80);
axis([1 80 -2 2]); grid on;
From the first plot, we see that the transmitted pulse is a rectangular pulse that spans Tsym samples. In the illustration, Tsym=8. The best averaging filter (matched filter) for this case is a rectangular filter (though they are not preferred in practice, I am just using it for simplifying the illustration) that spans 8 samples. Such a rectangular pulse can be mathematically represented in terms of unit step function as
The resulting rectangular pulse will have a value of 0.5 at the edges of the sampling instants (index 0 and 7) and a value of ‘1’ at the remaining indices in between the edges. Such a rectangular function is indicated below.
The incoming signal is convolved with the averaging filter and the resultant output is given below
We can note that the averaged output peaks at the locations where the symbol transition occurs. Thus, when the signal is sampled at those ideal locations, the BPSK symbols [+1,-1,+1, …] can be recovered perfectly.
But the problem here is: “How does the receiver know the ideal sampling instants?”. The solution is “someone has to supply those ideal sampling instants”. A symbol time recovery circuit is used for this purpose.
Coming back to the receiver architecture, lets add a symbol time recovery circuit that supplies the recovered timing instants. The signal will be re-sampled at those instants supplied by the recovery circuit.
The Algorithm behind Symbol Timing Recovery:
Different algorithms exist for symbol timing recovery and synchronization. An “Early/Late Symbol Recovery algorithm” is illustrated here.
The algorithm starts by selecting an arbitrary sample at some time (denoted by T). It captures the two adjacent samples (on either side of the sampling instant T) that are separated by δ seconds. The sample at the index T-δ is called Early Sample and the sample at the index T+δ is called Late Sample. The timing error is generated by comparing the amplitudes of the early and late samples. The next symbol sampling time instant is either advanced or delayed based on the sign of difference between the early and late sample.
1) If the Early Sample = Late Sample : The peak occurs at the on-time sampling instant T. No adjustment in the timing is needed. 2) If |Early Sample| > |Late Sample| : Late timing, the sampling time is offset so that the next symbol is sampled T-δ/2 seconds after the current sampling time. 3) If |Early Sample| < |Late Sample| : Early timing, the sampling time is offset so that the next symbol is sampled T+δ/2 seconds after the current sampling time.
These three situations are shown next.
There exist many variations to the above mentioned algorithm. The Early/Late synchronization technique given here is the simplest one taken for illustration.
Let’s complete the architecture with a signal quantization and constellation de-mapping block which gives out the estimated demodulated symbols.
Rate this article: Note: There is a rating embedded within this post, please visit this post to rate it.
Key focus: Derive BPSK BER (bit error rate) for optimum receiver in AWGN channel. Explained intuitively step by step.
BPSK modulation is the simplest of all the M-PSK techniques. An insight into the derivation of error rate performance of an optimum BPSK receiver is essential as it serves as a stepping stone to understand the derivation for other comparatively complex techniques like QPSK,8-PSK etc..
The ideal constellation diagram of a BPSK transmission (Figure 1) contains two constellation points located equidistant from the origin. Each constellation point is located at a distance from the origin, where Es is the BPSK symbol energy. Since the number of bits in a BPSK symbol is always one, the notations – symbol energy (Es) and bit energy (Eb) can be used interchangeably (Es=Eb).
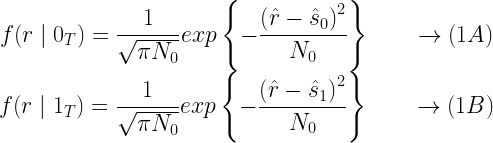
Assume that the BPSK symbols are transmitted through an AWGN channel characterized by variance = N0/2 Watts. When 0 is transmitted, the received symbol is represented by a Gaussian random variable ‘r‘ with mean=S0 = and variance =N0/2. When 1 is transmitted, the received symbol is represented by a Gaussian random variable – r with mean=S1= and variance =N0/2. Hence the conditional density function of the BPSK symbol (Figure 2) is given by,
Figure 1: BPSK – ideal constellation
Figure 2: Probability density function (PDF) for BPSK Symbols
An optimum receiver for BPSK can be implemented using a correlation receiver or a matched filter receiver (Figure 3). Both these forms of implementations contain a decision making block that decides upon the bit/symbol that was transmitted based on the observed bits/symbols at its input.
Figure 3: Optimum Receiver for BPSK
When the BPSK symbols are transmitted over an AWGN channel, the symbols appears smeared/distorted in the constellation depending on the SNR condition of the channel. A matched filter or that was previously used to construct the BPSK symbols at the transmitter. This process of projection is illustrated in Figure 4. Since the assumed channel is of Gaussian nature, the continuous density function of the projected bits will follow a Gaussian distribution. This is illustrated in Figure 5.
Figure 4: Role of correlation/Matched Filter
After the signal points are projected on the basis function axis, a decision maker/comparator acts on those projected bits and decides on the fate of those bits based on the threshold set. For a BPSK receiver, if the a-prior probabilities of transmitted 0’s and 1’s are equal (P=0.5), then the decision boundary or threshold will pass through the origin. If the apriori probabilities are not equal, then the optimum threshold boundary will shift away from the origin.
Figure 5: Distribution of received symbols
Considering a binary symmetric channel, where the apriori probabilities of 0’s and 1’s are equal, the decision threshold can be conveniently set to T=0. The comparator, decides whether the projected symbols are falling in region A or region B (see Figure 4). If the symbols fall in region A, then it will decide that 1 was transmitted. It they fall in region B, the decision will be in favor of ‘0’.
For deriving the performance of the receiver, the decision process made by the comparator is applied to the underlying distribution model (Figure 5). The symbols projected on the axis will follow a Gaussian distribution. The threshold for decision is set to T=0. A received bit is in error, if the transmitted bit is ‘0’ & the decision output is ‘1’ and if the transmitted bit is ‘1’ & the decision output is ‘0’.
This is expressed in terms of probability of error as,
Or equivalently,
By applying Bayes Theorem↗, the above equation is expressed in terms of conditional probabilities as given below,
Since a-prior probabilities are equal P(0T)= P(1T) =0.5, the equation can be re-written as
Intuitively, the integrals represent the area of shaded curves as shown in Figure 6. From the previous article, we know that the area of the shaded region is given by Q function.
Figure 6a, 6b: Calculating Error Probability
Similarly,
From (4), (6), (7) and (8),
For BPSK, since Es=Eb, the probability of symbol error (Ps) and the probability of bit error (Pb) are same. Therefore, expressing the Ps and Pb in terms of Q function and also in terms of complementary error function :
Rate this article: Note: There is a rating embedded within this post, please visit this post to rate it.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.



















































![a[k]](https://s0.wp.com/latex.php?latex=a%5Bk%5D&bg=ffffff&fg=000&s=0&c=20201002)

![b[k] = b[k-1] \oplus a[k] \;\;\;\;\;\; (modulo-2) \;\;\;\;\;\; (1)](https://s0.wp.com/latex.php?latex=b%5Bk%5D+%3D+b%5Bk-1%5D+%5Coplus+a%5Bk%5D+%5C%3B%5C%3B%5C%3B%5C%3B%5C%3B%5C%3B+%28modulo-2%29+%5C%3B%5C%3B%5C%3B%5C%3B%5C%3B%5C%3B+%281%29+&bg=ffffff&fg=000&s=2&c=20201002)

![a[k] = b[k] \oplus b[k-1] \;\;\;\;\;\; (modulo-2) \;\;\;\;\;\; (2)](https://s0.wp.com/latex.php?latex=a%5Bk%5D+%3D+b%5Bk%5D+%5Coplus+b%5Bk-1%5D%C2%A0+%5C%3B%5C%3B%5C%3B%5C%3B%5C%3B%5C%3B+%28modulo-2%29+%5C%3B%5C%3B%5C%3B%5C%3B%5C%3B%5C%3B+%282%29+&bg=ffffff&fg=000&s=2&c=20201002)



![P_b = erfc \left(\sqrt{\frac{E_b}{N_0}} \right) \left[ 1-\frac{1}{2} erfc \left( \sqrt{\frac{E_b}{N_0}} \right) \right] \;\; (3)](https://s0.wp.com/latex.php?latex=P_b+%3D+erfc+%5Cleft%28%5Csqrt%7B%5Cfrac%7BE_b%7D%7BN_0%7D%7D+%5Cright%29+%5Cleft%5B+1-%5Cfrac%7B1%7D%7B2%7D+erfc+%5Cleft%28+%5Csqrt%7B%5Cfrac%7BE_b%7D%7BN_0%7D%7D+%5Cright%29+%5Cright%5D+%5C%3B%5C%3B+%283%29+&bg=ffffff&fg=000&s=2&c=20201002)












![y[n]](https://s0.wp.com/latex.php?latex=y%5Bn%5D&bg=ffffff&fg=000&s=0&c=20201002)





![u[n]-u[n-8]](https://s0.wp.com/latex.php?latex=u%5Bn%5D-u%5Bn-8%5D+&bg=ffffff&fg=000&s=2&c=20201002)